


Des chercheurs américains viennent de concevoir un thon robotique qui accélère et ralentit (presque) aussi bien que les vrais poissons. Vous ne le savez peut-être pas, mais il s’agit d’une véritable prouesse. Et cette découverte pourrait s’avérer très utile.
Cela fait longtemps que les robots sous-marins existent. Toutefois, ils n’ont jamais donné grande satisfaction à leurs développeurs. En effet, ils n’avaient, jusqu’à présent, pu être réglés que sur une seule vitesse. Ce qui rendait leur nage bien moins efficace que celle des poissons biologiques, capables de décélérer et d’accélérer à souhait.
Les chercheurs savaient que le secret de ces changements de rythme résidait dans la variabilité de la rigidité de la queue des poissons. Mais ils n’avaient encore jamais réussi à l’appliquer à leurs robots. Deux chercheurs de l’université de Virginie, Dann Quinn et Qiang Zhong, viennent de résoudre cette énigme, à l’aide de calculs mathématiques.
« De manière surprenante, un résultat simple est ressorti de tous ces calculs : la rigidité devrait augmenter avec le carré de la vitesse de nage », a résumé M. Quinn, contacté par Big Think.
Pour illustrer l’utilité de cette formule, M. Quinn se sert d’une comparaison avec le cyclisme. « Avoir une seule rigidité de la queue, c’est comme avoir un seul rapport de vitesse sur un vélo. Vous ne seriez efficace qu’à une seule vitesse. Ce serait comme traverser San Francisco avec un vélo à pignon fixe ; vous seriez épuisé après seulement quelques pâtés de maisons », explique-t-il.
Mise en pratique
C’est en combinant la dynamique des fluides et la biomécanique que les chercheurs sont parvenus à leurs fins, perçant ainsi « le mystère qui existe depuis longtemps sur la façon dont la rigidité de la queue affecte les performances de nage », selon les termes de M. Zhong.
« Nous ne nous concentrons pas uniquement sur l’analyse théorique, mais nous proposons également un guide pratique pour la rigidité réglable. La stratégie de rigidité accordable que nous proposons s’est avérée efficace dans des missions de natation réalistes, où un poisson-robot a atteint simultanément une vitesse élevée et une grande efficacité de nage », se félicite-t-il.
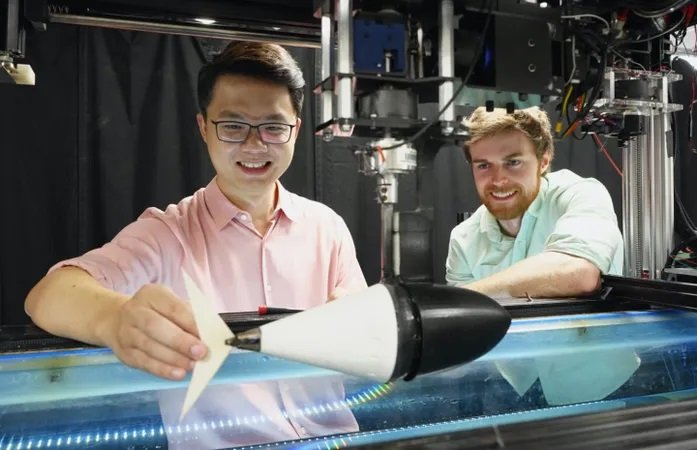
La recette connue, les deux chercheurs l’ont ainsi appliquée à un robot sous-marin ressemblant à un thon. Et c’est un succès. Leur appareil accélère et ralentit presque aussi bien que les vrais poissons, et beaucoup mieux que les engins conçus jusqu’ici.
« Ce qui s’est passé », se souvient M. Quinn, « c’est que notre robot a soudainement pu nager sur une plus grande plage de vitesses tout en utilisant presque deux fois moins d’énergie que le même robot avec une queue à rigidité fixe. L’amélioration était vraiment remarquable. »
Pour quoi faire ?
La formule gagnante dans leurs mains, les deux chercheurs comptent bien l’exploiter sur d’autres robots aquatiques. Ils envisagent par exemple de concevoir des créatures aussi grandes qu’un dauphin et aussi petites qu’un têtard, ainsi qu’en développer sur base d’animaux nageant différemment, telles que les raies. Ce robot raie est d’ailleurs déjà en cours de construction.
« Je ne pense pas que nous soyons à court de projets de sitôt », prévient M. Quinn. « Chaque animal aquatique que nous avons étudié nous a donné de nouvelles idées sur la façon de construire de meilleurs robots nageurs. Et il y a encore beaucoup de poissons dans la mer ».
Evidemment, les deux chercheurs américains ne créent pas des poissons robotiques pour le plaisir. Toute recherche a une fin utile. Les robots submersibles servent en effet à explorer les profondeurs sous-marines, à la recherche de nouvelles formes de vie ou d’épaves. Les appareils utilisés jusqu’à aujourd’hui étant limités à une seule vitesse, ils s’avéraient souvent trop rapides ou trop lents, pour être pleinement efficaces.
Avec l’invention de MM. Quinn et Zhong, les futurs robots pourront fendre les eaux à toute vitesse pour se rendre sur les zones dignes d’intérêt, avant de ralentir pour donner le temps aux scientifiques d’effectuer de meilleures observations et des analyses plus poussées.
Leur travail a été publié dans la revue Science Robotics.
Pour aller plus loin: